

近日,机械与电子工程学院苑进教授团队在《Computers and Electronics in Agriculture》在线发表了题为“Development of a novel pull-cutting end-effector for ex-situ robotic harvesting of white asparagus based on MBD-DEM coupling simulation”的研究论文。张萍博士为该论文的第一作者,苑进教授为该论文的通讯作者。
芦笋富含营养且具有抗癌保健功效,被誉为“蔬菜之王”,目前国际上白芦笋采收仍以人工作业为主,成本高、费时费力。白芦笋是我国出口额最大的单一蔬菜品种,攻克白芦笋采收技术瓶颈,对提高芦笋产业的国际竞争力意义重大。
芦笋生长在地下,且收获空间有限,对采收模式和末端执行器的设计提出了极高的要求。该研究受“行船中下网捞鱼”启发,考虑采收过程与机器行走的运动协同,首次提出了不停车、非原位、网捞采收新模式,突破国外“不停车+原位采收+运动补偿”的采收方案弊端,实现了从原位采收到非原位采收的跨越,从源头上解决了机器行走与原位采收的动静矛盾,为机器人的选择性高速采收奠定了基础。
针对芦笋脆嫩多汁、易断易损伤的特点,以及土中作业过程中的一些参数难以有效测量的难点,该研究创新设计了刚柔耦合拉切末端执行器(PCEE),通过前行入土、拉切、出土、抛射4个子过程实现高效、低损伤收获,整个采收过程笋芽由土壤包裹损伤概率极小。通过建立PCEE-土壤-笋模型,利用双向耦合MBD-DEM (Multi-Body Dynamics and Discrete Element Method,多体动力学与离散单元法)分析采收过程,明确了高速采收过程中末端执行器的构型变化以及部件-土-笋之间的互作耦合机理和粒子的运动规律,对末端执行器的结构设计、作业参数优化、采收性能提升具有重要的理论依据。
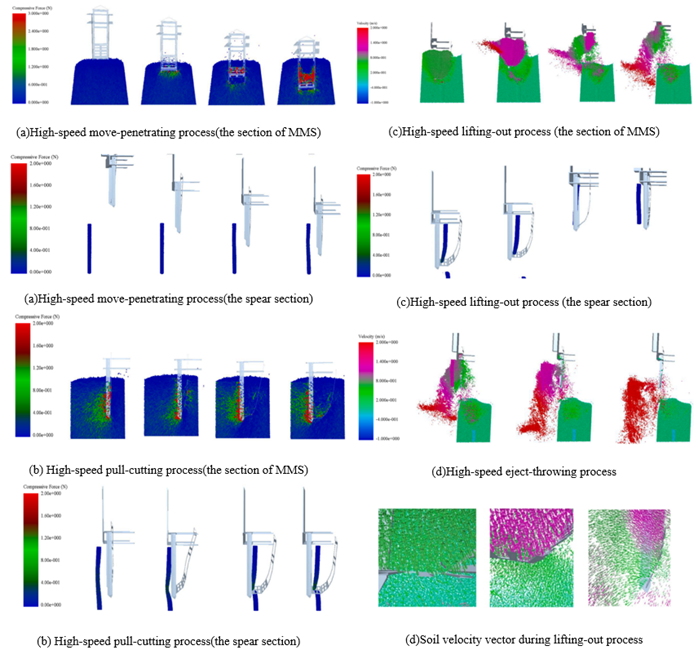
图1. 基于MBD-DEM的采收过程仿真分析
该研究构建了网捞采收机器人平台,并进行了室内与田间采收试验,对采收过程进行了验证。试验结果验证了所提出的采收模式和末端执行器的结构在白芦笋选择性收获机器人中的有效性和可行性,突破了笋芽高速采收的瓶颈问题,为选择性收获和触土部件创新设计提供新思路新方法,具有重要的学术意义和工程价值。
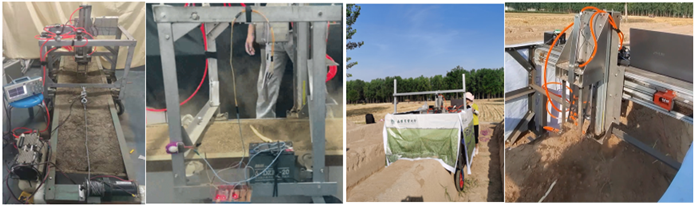
图2. PCEE室内与田间采收试验
该研究得到了国家自然科学基金的资助。
论文链接:https://doi.org/10.1016/j.compag.2023.107641
编 辑:万 千
审 核:贾 波





