

机械与电子工程学院刘平团队在《Computers and Electronics in Agriculture》在线发表了题为《A bionic adaptive end-effector with rope-driven fingers for pear fruit harvesting》,研究生李明为该论文的第一作者,刘平教授为该论文的通讯作者。
随着农业机器人技术的发展,越来越多的水果收获机器人被应用到实际的生产中来。在水果收获机器人的研制过程中,采摘末端执行器是最为关键的一环,直接影响采摘收获的作业效率。该研究以梨果收获为例,提出了一种仿生自适应绳驱梨果采摘末端执行器,以提高梨果收获机器人的采摘作业效率,降低梨果的损伤率。
针对自然环境中梨果表皮脆弱,采摘过程中易受损伤问题,该研究仿生人手进行了末端执行器的建模与研制。该末端执行器仿照人手结构,采用绳驱的方式驱动手指完成抓握动作;末端执行器指节内侧贴装有自研夹持力传感器,可实时监测和控制手指包络抓取的夹持力,防止对梨果造成损伤;此外,该末端执行器的指节上还贴装有自研姿态传感器,以实时监测各手指的姿态与位置,使之运行在安全的工作空间和工作状态下,进一步提高抓取的效率;最终该末端执行器可安装在梨果收获机器人不同型号机械臂的末端,实现灵活作业。
该研究构建了梨果收获采摘平台,并进行了模拟采摘试验。试验结果表明,该研究提出的仿生自适应绳驱梨果采摘末端执行器对不同品种、形状和大小的梨果具有自适应抓取能力,抓取过程稳定,抓取动作响应速度快,可实现无损伤抓取,对促进梨果收获自动化与智能化有重要意义,为后续水果采摘末端执行器的研究提供了学术和工程参考。

图1 人手抓取采摘动作参考
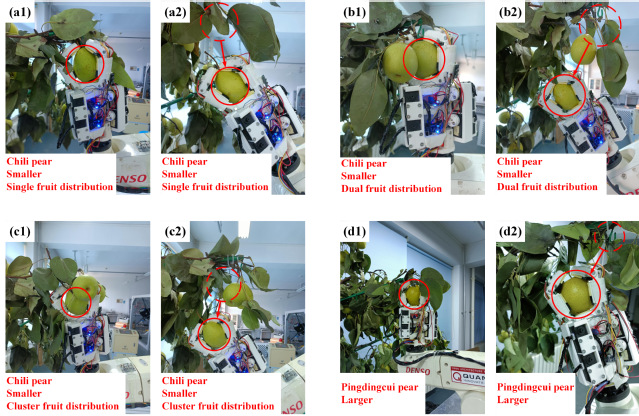
图2 实验室模拟抓取采摘试验
论文链接:https://doi.org/10.1016/j.compag.2023.107952
编 辑:万 千
审 核:贾 波





